[项目研究] 序列数据升维技术调研——格拉姆角场(GASF/GADF)及其同类方法
时间序列数据升维技术研究笔记
格拉姆角场(GASF/GADF)及其同类方法
备注:本笔记系统整理了将一维时间序列编码为二维图像的核心技术,重点介绍格拉姆角场方法,兼顾其他主流升维手段,并附高水平期刊应用案例及可逆性分析。
关键词:GASF · GADF · 马尔可夫转移场 · 递归图 · 时频变换 · 1D→2D · 深度学习 · 时间序列
目录
- 为什么要”升维”?
- 格拉姆角场(GAF):GASF 与 GADF
- 2.1 直观理解
- 2.2 数学原理
- 2.3 完整计算流程
- 可逆性分析:能从图像还原时间序列吗?
- 其他主流数据升维方法
- 4.1 马尔可夫转移场(MTF)
- 4.2 递归图(Recurrence Plot, RP)
- 4.3 短时傅里叶变换(STFT)/ 语谱图
- 4.4 连续小波变换(CWT)/ 小波时频图
- 4.5 TimesNet 周期重塑法
- 4.6 对称点模式(SDP)
- 方法横向对比
- 高水平期刊应用案例
- 代码速查:Python 实现
- 总结与选型建议
1. 为什么要”升维”?
1.1 问题背景
在机器学习领域,图像识别技术(CNN)已经发展得相当成熟——ResNet、EfficientNet、Vision Transformer 等架构在图像分类上能达到接近人类的水平。然而,大量现实数据是一维时间序列:心电图、振动信号、股价、地震波……
传统做法是用1D-CNN或RNN处理这些信号,但这样就”放弃”了图像领域几十年积累的强大预训练模型。
核心动机:如果我们能把时间序列”画”成一张图,就能直接套用图像识别领域的全部工具。
1.2 升维的本质
原始时间序列(长度 N):
[x₁, x₂, x₃, ..., xₙ] ──→ N×N 的二维矩阵(图像)
每个像素点 (i, j) 编码了时刻 i 与时刻 j 之间某种关系
不同的升维方法,本质区别在于:“时刻 i 与时刻 j 之间的关系”如何定义。
2. 格拉姆角场(GAF):GASF 与 GADF
原始论文:Wang, Z., & Oates, T. (2015). Imaging Time-Series to Improve Classification and Imputation. IJCAI 2015. arXiv:1506.00327
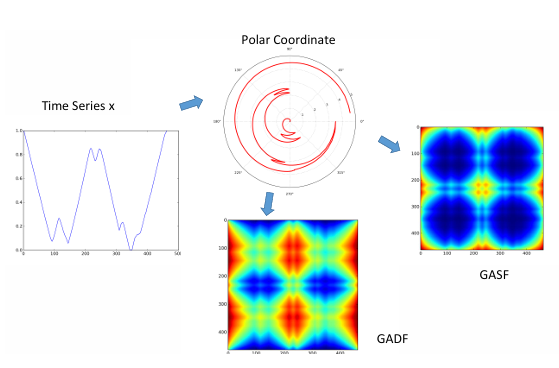
2.1 直观理解
一个类比:想象你有一段旋律,每个音符有一个音高值。GAF 的做法是:
- 把每个音符的”高低”转换为一个角度(把数值映射到单位圆上)
- 对于任意两个时刻 i 和 j,计算它们对应角度的和或差
- 把所有时刻对的计算结果排成一张矩阵——这就是 GASF(角度和)或 GADF(角度差)
这张矩阵的对角线(i = j)记录了每个时刻自身的信息,而非对角线元素(i ≠ j)记录了不同时刻之间的”相互关系”——这正是 CNN 最擅长捕捉的结构化模式!
2.2 数学原理
第一步:归一化
将时间序列 $X = {x_1, x_2, \ldots, x_N}$ 归一化到 $[-1, 1]$:
\[\tilde{x}_i = \frac{(x_i - \max(X)) + (x_i - \min(X))}{\max(X) - \min(X)}\]⚠️ 也可归一化到 $[0, 1]$,区别见第3节可逆性分析。
归一化后,每个值 $\tilde{x}_i \in [-1, 1]$,正好是某个角度的余弦值。
第二步:极坐标编码
将数值映射为极坐标中的角度:
\[\phi_i = \arccos(\tilde{x}_i), \quad \phi_i \in [0°, 180°]\] \[r_i = \frac{t_i}{N} \quad \text{(时间戳归一化为半径,表达时序信息)}\]几何意义:每个数据点成为单位圆上的一个点,时间轴变成了”绕圆弧旋转的方向”,数值大小变成了”离圆心的角度偏转”。
cos(φ) = x̃
φ = arccos(x̃)
[-1] [0] [+1]
φ=180° φ=90° φ=0°
● ● ● ← 单位圆上的对应位置
第三步A:构造 GASF(角度求和场)
\[\text{GASF}_{ij} = \cos(\phi_i + \phi_j)\]利用三角恒等式 $\cos(\alpha + \beta) = \cos\alpha\cos\beta - \sin\alpha\sin\beta$,展开为:
\[\boxed{\text{GASF}_{ij} = \tilde{x}_i \tilde{x}_j - \sqrt{1-\tilde{x}_i^2}\cdot\sqrt{1-\tilde{x}_j^2}}\]物理含义:GASF 矩阵编码了时刻 i 和时刻 j 对应角度之”叠加”后的余弦投影,是一种内积型的相关性度量。
第三步B:构造 GADF(角度差分场)
\[\text{GADF}_{ij} = \sin(\phi_i - \phi_j)\]展开为:
\[\boxed{\text{GADF}_{ij} = \sqrt{1-\tilde{x}_i^2}\cdot\tilde{x}_j - \tilde{x}_i\cdot\sqrt{1-\tilde{x}_j^2}}\]物理含义:GADF 矩阵编码了两时刻角度之”差”的正弦值,更突出相对变化,是一种反对称型度量(GADF 主对角线恒为 0,因为 $\sin(0) = 0$)。
2.3 完整计算流程
原始序列 X = [0.2, 0.8, 0.5, -0.3, 0.9]
↓ 归一化至[-1,1]
X̃ = [0.2, 0.8, 0.5, -0.3, 0.9](已在范围内)
↓ arccos 编码
Φ = [arccos(0.2), arccos(0.8), arccos(0.5), arccos(-0.3), arccos(0.9)]
= [78.5°, 36.9°, 60°, 107.5°, 25.8°]
↓ 构造矩阵
GASF[i,j] = cos(Φ[i] + Φ[j]) → 5×5 矩阵
GADF[i,j] = sin(Φ[i] - Φ[j]) → 5×5 矩阵(反对称)
GASF 矩阵的对称性
GASF 是对称矩阵(因为 $\cos(\alpha+\beta) = \cos(\beta+\alpha)$),图像看起来关于主对角线镜像对称。
GADF 是反对称矩阵($\sin(\alpha-\beta) = -\sin(\beta-\alpha)$),主对角线为零,上下三角互为相反数。
图像可视化特征
| 特征 | GASF | GADF |
|---|---|---|
| 对称性 | 中心对称(关于主对角线) | 反对称(上三角 = -下三角) |
| 主对角线 | $\cos(2\phi_i)$,编码原始值 | 恒为 0 |
| 像素范围 | $[-1, 1]$ | $[-1, 1]$ |
| 视觉特点 | 暖色块对应相似时段 | 高频变化更突出 |
3. 可逆性分析:能从图像还原时间序列吗?
通过GASF和GADF变换,我们可以将1维的数据升维,变为高维度矩阵,使其可以兼容一系列的二维深度学习模型或者图像处理方法。
那么这个变换是否可逆,毕竟我们很多时候需要的,其实是那个一维数据结果而不是变换后的矩阵。如果这样的话,这就代表其适用于生成式模型等等自由度更高的模型,这对于建模、优化设计等领域都是非常有用的。
答案是:GASF 在特定条件下是可逆的,但有约束。
3.1 GASF 的双射性(Bijection)
GASF的原始论文中明确提到:
“Inspired by the bijection property of GASF on 0/1 scaled data…”
当时间序列归一化到 $[0, 1]$(而非 $[-1, 1]$)时,$\phi_i = \arccos(\tilde{x}_i) \in [0°, 90°]$,GASF 是双射(一一对应)的,即可以无损还原。
3.2 逆变换方法
从主对角线恢复
GASF 的主对角线元素满足:
\[\text{GASF}_{ii} = \cos(\phi_i + \phi_i) = \cos(2\phi_i) = 2\cos^2(\phi_i) - 1 = 2\tilde{x}_i^2 - 1\]因此:
\[\tilde{x}_i = \sqrt{\frac{\text{GASF}_{ii} + 1}{2}}\]逆变换步骤:
- 取 GASF 矩阵的主对角线 $d_i = \text{GASF}_{ii}$
- 计算 $\tilde{x}_i = \sqrt{(d_i + 1) / 2}$
- 反归一化:$x_i = \tilde{x}_i \cdot (\max - \min) + \min$
import numpy as np
def gasf_inverse(gasf_matrix, x_min, x_max):
"""从 GASF 矩阵的主对角线恢复时间序列"""
diag = np.diag(gasf_matrix) # 取主对角线
x_normalized = np.sqrt((diag + 1) / 2) # 逆变换
x_original = x_normalized * (x_max - x_min) + x_min # 反归一化
return x_original
3.3 可逆性的限制条件
| 条件 | 是否可逆 | 说明 |
|---|---|---|
| 归一化到 $[0,1]$,主对角线可见 | ✅ 完全可逆 | $\phi \in [0°, 90°]$,arccos 单调,无歧义 |
| 归一化到 $[-1,1]$ | ⚠️ 部分可逆 | $\phi \in [0°, 180°]$,$\sqrt{}$ 会丢失符号 |
| 图像压缩/量化(如保存为 JPEG) | ❌ 有损 | 像素值失真,无法精确恢复 |
| 降分辨率(N×N → n×n,n < N) | ❌ 有损 | 信息丢失 |
归一化到 [-1,1] 时的符号问题
当归一化到 $[-1,1]$ 时,$\phi \in [0°, 180°]$,且:
\[\text{GASF}_{ii} = \cos(2\phi_i) = 2\tilde{x}_i^2 - 1\]由于 $\tilde{x}_i^2$ 无法区分 $+\tilde{x}_i$ 和 $-\tilde{x}_i$,存在符号歧义。此时需要借助 GADF 来辅助恢复符号信息:
\[\text{GADF}_{i, i+1} = \sin(\phi_i - \phi_{i+1})\]通过 GADF 的差分信息,可以推断相邻时刻的增减关系,从而恢复符号。
3.4 GADF 的可逆性
GADF 主对角线恒为 0,因此无法单独从 GADF 恢复原始序列。但 GADF 与 GASF 联合使用时,信息是互补的。
3.5 实际应用中的逆变换价值
逆变换主要用于:
- 信号插补(Imputation):用 Denoising Autoencoder 在图像域填补缺失段,再还原为曲线
- 数据增强验证:检查变换是否保真
- 生成模型:在 GAF 图像空间训练 GAN/VAE,生成新的时间序列
4. 其他主流数据升维方法
4.1 马尔可夫转移场(Markov Transition Field, MTF)
同样来自 Wang & Oates (2015) 原始论文。
核心思想
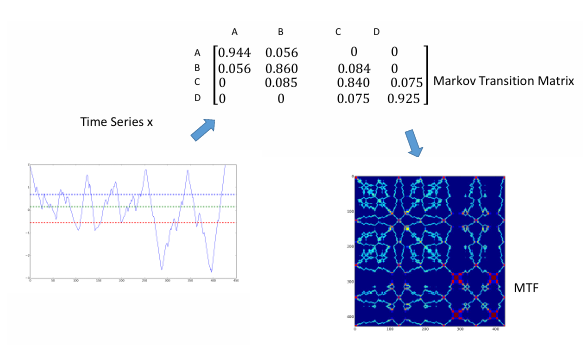
如上图,这里考虑一个时间序列,把时间序列看作一个马尔可夫过程:即设置几个不同的数值参考,将时间序列离散化为 Q 个分位数区间(量化区间),例如上图设置了三根虚线,将整张图纵向分割成了四段。
然后统计从区间 i 跳转到区间 j 的概率,形成转移矩阵。
例如从上至下的区间分别记作A,B,C,D,根据时间序列处于哪个区间,给时间序列数据标记为A,B,C,D四个状态。那么从左上角的A状态,下一秒有0.944的概率变为状态A,以及0.056的概率变为状态B,以此类推,产生对应的状态转移矩阵
再按数据点的时间顺序展开为二维图。
这里如果还是不理解什么叫马尔科夫过程,这里强烈推荐观看真理元素的这期节目:”这个数学模型(几乎)能预测宇宙万物” https://www.bilibili.com/video/BV1Aj8DzzE42/?spm_id_from=333.337.search-card.all.click&vd_source=8b6ffc174a6c5a4993bab3a38f1b70f7
很好的讲了马尔科夫链,核弹与蒙特卡洛算法
构造步骤
- 量化:将序列 $X$ 分入 $Q$ 个分位数区间(bins)
- 计算转移频率矩阵 $W$:$W_{ij}$ = 样本落入区间 $q_i$ 后下一步落入 $q_j$ 的频率
- 展开为时间-概率场: \(\text{MTF}_{ij} = W_{q_i q_j}\) 其中 $q_i$ 是时刻 $i$ 所在的区间编号
与 GASF 的对比
- MTF 关注状态转移动力学(类似统计力学中的转移矩阵)
- GASF 关注角度相关性(几何关系)
- MTF 更适合捕捉周期性和状态机特征;GASF 更适合捕捉幅值相关性
可逆性
MTF 不可逆。量化过程会丢失精确数值信息,无法从 MTF 还原原始序列。
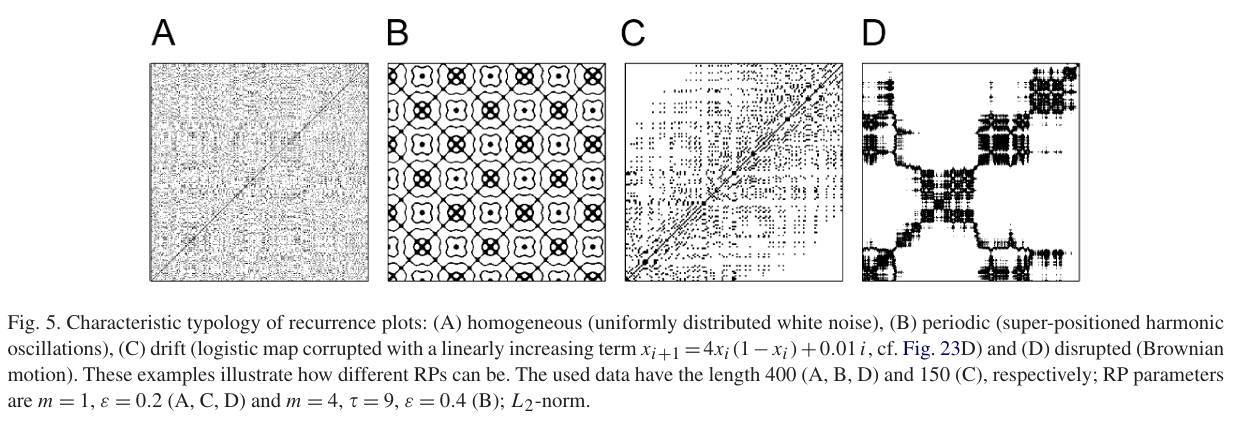
4.2 递归图(Recurrence Plot, RP)
来自非线性动力学领域:Eckmann, J.-P. et al. (1987). Recurrence Plots of Dynamical Systems. Europhysics Letters.
核心思想
判断时刻 $i$ 的状态是否”回到了”时刻 $j$ 的邻域:
\[\text{RP}_{ij} = \Theta(\varepsilon - \|x_i - x_j\|)\]其中 $\Theta$ 是 Heaviside 阶跃函数,$\varepsilon$ 是阈值半径。
通俗理解:如果 $x_i \approx x_j$,则 $(i,j)$ 像素点为白色(1);否则为黑色(0)——得到一张黑白图。
视觉特征含义
| 视觉模式 | 含义 |
|---|---|
| 主对角线(恒为白) | 序列与自身完全匹配 |
| 平行于主对角线的线段 | 周期性或准周期振荡 |
| 矩形白色块 | 层流/静止区段 |
| 孤立白点 | 随机/混沌状态 |
可逆性
RP 不可逆(信息丢失严重,仅保留”是否相似”的二值信息)。
*递归图相关研究里面用的比较少,图也比较难看懂,不如上述GAF以及马尔科夫变换简单直观好用。
Recurrence plots for the analysis of complex systems,这篇文章详细介绍了递归图,93页的理论推导,看了下有点看不懂,以防万一先备份在这里。
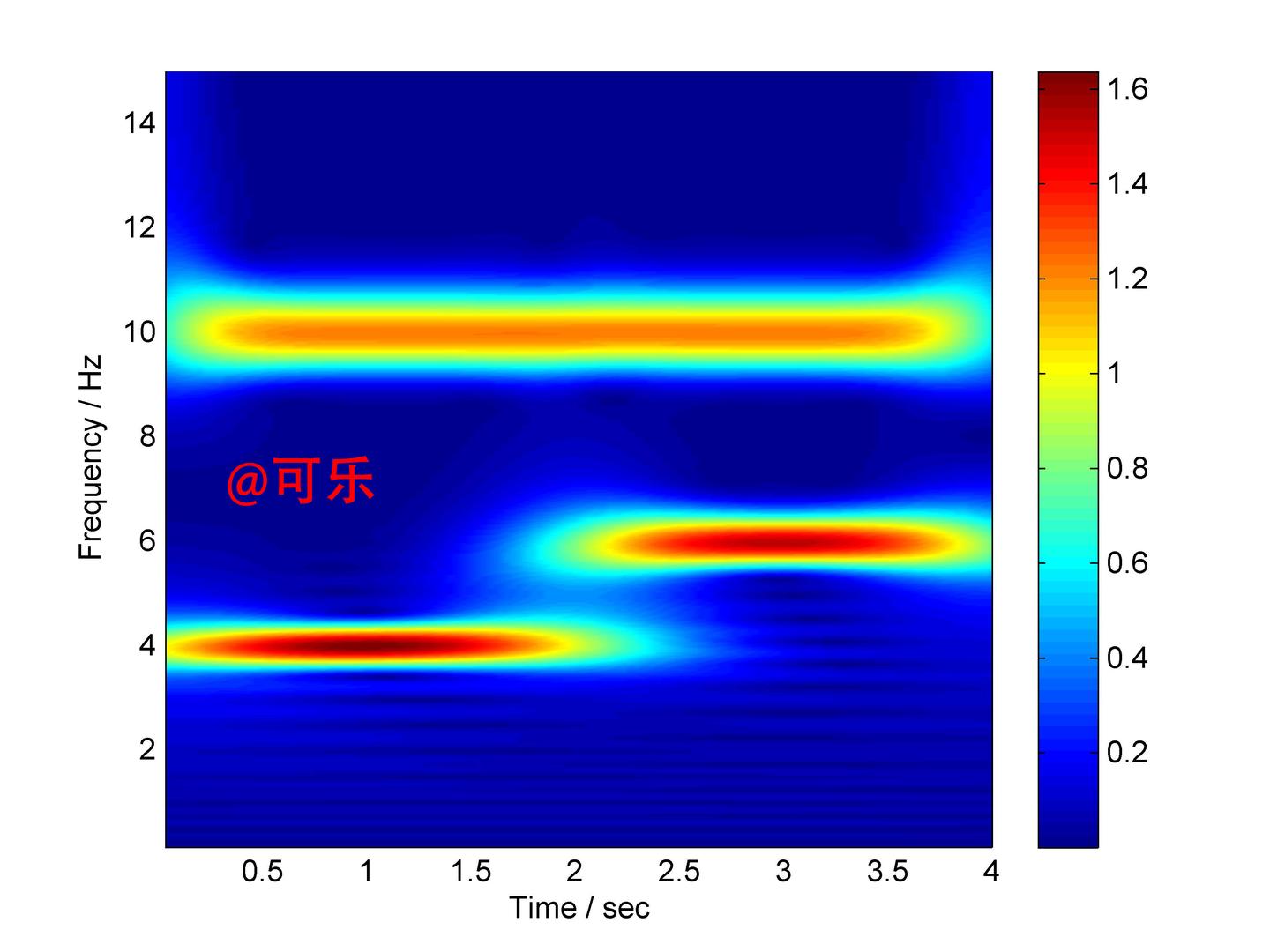
4.3 短时傅里叶变换(STFT)/ 语谱图(Spectrogram)
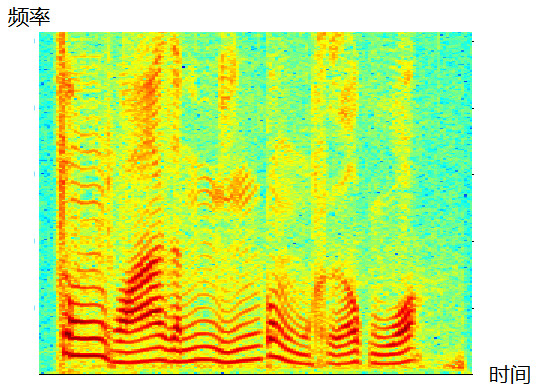
核心思想
用滑动窗口对时间序列做傅里叶变换:
\[\text{STFT}(t, f) = \int_{-\infty}^{\infty} x(\tau) \cdot w(\tau - t) \cdot e^{-j2\pi f\tau} d\tau\]其中 $w(\tau)$ 是窗函数(如 Hamming、Hann 窗)。结果是一个时间-频率矩阵,取模得到语谱图。
特点
- 横轴:时间,纵轴:频率,颜色:能量强度
- 时间分辨率与频率分辨率之间存在 Heisenberg 不确定原理 的权衡(窗越宽,频率分辨率越高,时间分辨率越低)
可逆性
STFT 原则上完全可逆(可用 Griffin-Lim 算法或直接逆变换从复数 STFT 还原),但如果只保存语谱图(丢失相位信息),则只能近似恢复。
*语谱图也是老资历了,和MFCC(梅尔倒频谱系数)一起,在语音、音频信号处理里的特征表征很常用,简单来说就是将原始一维时域信号用STFT变换,取频域的幅度为纵轴,绘制在时域的时间横坐标上。
4.4 连续小波变换(CWT)/ 小波时频图(Scalogram)
核心思想
用一系列尺度变化的母小波 $\psi$ 与信号做卷积:
\[W(a, b) = \frac{1}{\sqrt{a}} \int x(t) \cdot \psi^*\left(\frac{t-b}{a}\right) dt\]其中 $a$ 是尺度(与频率成反比),$b$ 是平移(时间位置)。取模平方得到 Scalogram(能量-时频图)。
与 STFT 的区别
| STFT | CWT | |
|---|---|---|
| 时频分辨率 | 固定窗口,均匀分辨率 | 多尺度,高频高时间分辨率,低频高频率分辨率 |
| 适用场景 | 平稳信号 | 非平稳、瞬态特征 |
| 逆变换 | 容易 | 存在,但计算复杂 |
可逆性
CWT 原则上可逆(存在解析的逆小波变换公式),但需要保留完整复数系数,实际应用中若只存幅度图则信息有损。
*这里同上STFT,只是换成了小波变换而已,思路是完全一样的
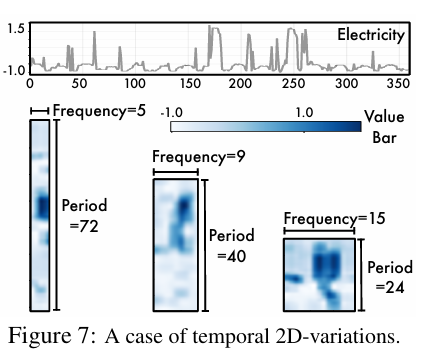
4.5 TimesNet 周期重塑法(2D Reshape)
Wu, H. et al. (2023). TimesNet: Temporal 2D-Variation Modeling for General Time Series Analysis. ICLR 2023.
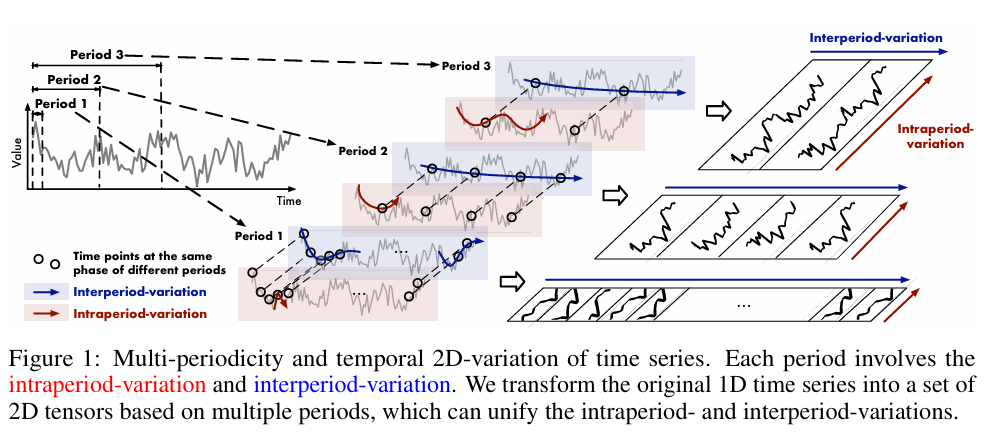
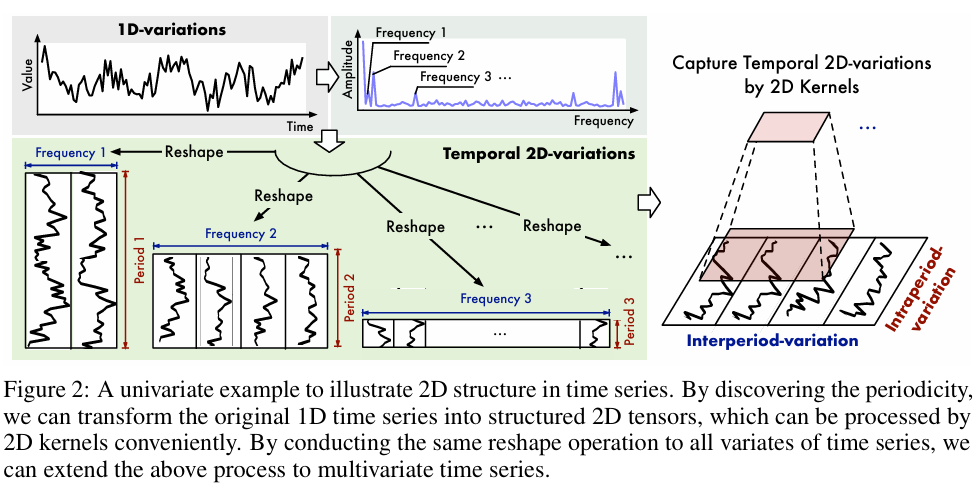
核心思想
这是一种非基于相似性矩阵的升维方式,直接利用时间序列的内在周期性:
- 用 FFT 找出主要周期 $p_1, p_2, \ldots$
- 将长度 $T$ 的序列重塑为 $\lceil T/p \rceil \times p$ 的二维矩阵
- 行方向 = 周期内变化(intraperiod),列方向 = 跨周期变化(interperiod)
- 用 2D CNN(如 Inception)处理这个矩阵
特点
- 自适应:根据数据自动确定重塑形状
- 无冗余:矩阵大小约等于原序列长度(不像 GASF 是 N×N)
- 可逆:重塑操作天然可逆(reshape 回原始长度即可)
*这个东西乍一看很复杂,其实原理很好理解。首先先对原始信号进行FFT,其中找幅度高的主要几个频率。而FFT的物理含义就是将原始信号拆解成多个频率不同的正弦信号,那么每个频率就对应原始信号中的一段周期性信息。
*上面的Figure2讲的清楚一点。然后找出不同频率的对应原始信号(直接反变换),然后reshape成元素一致的矩阵(8x2, 4x4, 1x16…)。用一个预训练好的二维CNN作为特征提取器,将其降维变换成图像
4.6 对称点模式(Symmetric Dot Pattern, SDP)
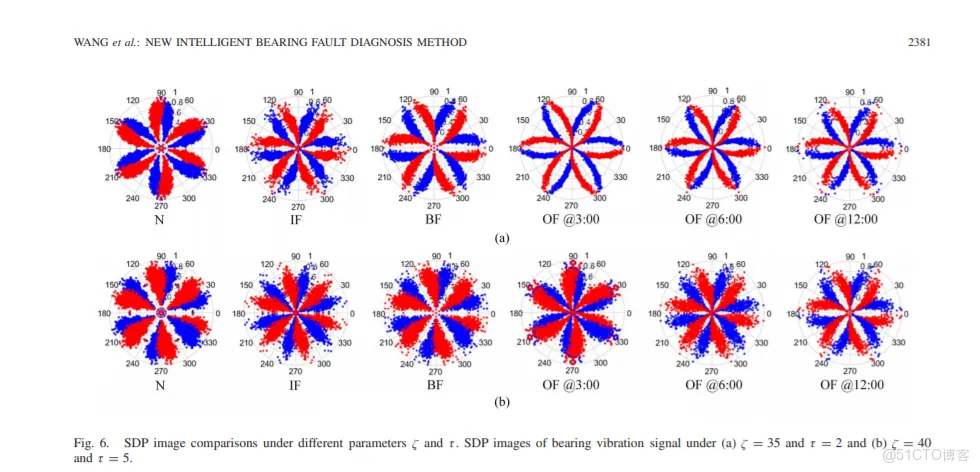
核心思想
将时间序列映射到极坐标平面,以角度编码时间、半径编码幅值,形成视觉上呈对称花样的散点图:
\[r_i = |x_i|, \quad \theta_i = \frac{2\pi t_i}{N}\]将各点及其关于某轴的镜像点同时绘制,得到对称图案。
特点
- 视觉直观,周期性特征形成规则几何图案
- 适用于振动信号和音频分析
- 不可逆(镜像操作丢失符号信息)
5. 方法横向对比
| 方法 | 核心度量 | 矩阵大小 | 主要优势 | 主要缺陷 | 可逆性 |
|---|---|---|---|---|---|
| GASF | 角度余弦和 | N×N | 保留时序关联性,对角线可还原 | 高维冗余(N×N vs N) | ✅ 有条件可逆 |
| GADF | 角度正弦差 | N×N | 突出动态变化,反对称特性 | 主对角线无信息 | ❌ 单独不可逆 |
| MTF | 马尔可夫转移概率 | N×N | 捕捉动力学状态转移 | 需量化,分辨率受限 | ❌ |
| RP | 相空间距离阈值 | N×N | 揭示非线性动力学、混沌 | 阈值敏感,二值化损失 | ❌ |
| STFT 谱图 | 时频能量 | T×F | 频域可解释,成熟工具 | 时频分辨率权衡 | ⚠️ 需保留相位 |
| CWT 小波图 | 多尺度时频能量 | S×T | 多分辨率,适合瞬态信号 | 计算量大 | ⚠️ 需保留相位 |
| TimesNet Reshape | 周期重塑 | ≈√T×√T | 高效,无冗余,可逆 | 依赖周期性假设 | ✅ 完全可逆 |
| SDP | 极坐标散点 | 自定义 | 视觉直观,周期识别好 | 定量信息弱 | ❌ |
选型提示:
- 工程故障诊断 → GASF + GADF 组合(利用 ImageNet 预训练 CNN)
- 生物医学信号 → CWT 小波图(时频分辨率灵活)或 GASF
- 非线性/混沌分析 → RP(递归图)
- 时间序列预测/补全 → TimesNet Reshape 或 GASF(可逆)
- 语音/振声分析 → STFT 语谱图(成熟工具链)
6. 高水平期刊应用案例
案例一:Nature Scientific Reports — 变压器故障诊断
文献:Transformer fault diagnosis method based on Gramian Angular Field and optimized neural network. Scientific Reports (Nature 旗下), 2025.
问题:变压器的溶解气体分析(DGA)数据是多元时间序列,传统方法难以综合利用多维特征。
方法:
- 将变压器 DGA 多元时间序列分别转换为 GASF 图像(每个气体指标一张图)
- 使用多通道 CNN 提取图像特征
- 引入优化算法(贝叶斯优化)自动调整网络超参数
结果:在多个标准变压器故障数据集上,诊断准确率超过 98%,优于传统 SVM 和标准 CNN。
意义:证明了 GAF 在工业设备健康管理领域的实用价值。
案例二:IEEE Transactions on Industrial Electronics — 电机轴承故障诊断
文献:A New Method for Diagnosing Motor Bearing Faults Based on Gramian Angular Field Image Coding and Improved CNN-ELM. IEEE Transactions on Industrial Electronics, 2023. DOI: 10.1109/TIE.2023.
问题:电机轴承振动信号包含复杂非平稳特征,一维信号特征提取困难,卷积网络难以直接建模时序相关性。
方法:
- 振动加速度信号 → GASF 图像(利用角度相关性保留时序结构)
- 构建改进 CNN(多尺度卷积核) + ELM(极限学习机)的混合分类器
- GASF 图像作为输入,故障类型(正常/内圈损伤/外圈损伤/滚珠损伤)为输出
结果:在 CWRU 轴承数据集上达到 99.4% 分类准确率,收敛速度比纯 CNN 快 3 倍。
意义:GASF 成功将轴承振动信号的时序相关性转化为图像纹理,使预训练 CNN 直接迁移成为可能。
案例三:Engineering in Agriculture / Remote Sensing — 卫星遥感作物分类
文献:Combining 2D encoding and convolutional neural network to enhance land use and land cover mapping from satellite image time series. Engineering Applications of Artificial Intelligence (Elsevier), 2023.
问题:卫星时间序列(SITS)数据量大、类别混淆度高,传统 1D-CNN 难以充分利用时序内相关性。
方法:
- 将多光谱波段的时间序列数据分别用 GASF、GADF、MTF 编码为图像
- 多编码融合 + ResNet / 时序-空间双流 CNN
- 在巴西土地覆被(SITS 数据集)上训练和评估
结果:融合多种编码的 CNN 在作物分类上比单一 1D-CNN 精度提高 4-8 个百分点,尤其对季节性作物识别效果显著。
意义:展示了 GAF 在遥感/地球观测领域的应用潜力,多种升维方法融合优于单一方法。
案例四:Sensors (MDPI,Q1) — 滚动轴承故障 + 小样本
文献:A Novel Method for Rolling Bearing Fault Diagnosis Based on Gramian Angular Field and Few-shot Learning. Sensors, 24(12), 2024. DOI: 10.3390/s24123967.
问题:工业场景中故障样本稀缺,深度学习需要大量标注数据。
方法:
- 振动信号 → GASF 图像
- 孪生网络(Siamese Network)实现小样本学习
- 结合 GASF 的图像相似性度量替代原始信号比较
亮点:每类仅用 5-10 个样本即可达到 92%+ 诊断准确率(传统方法需要数百样本),充分利用了 GASF 图像化后支持迁移学习的特性。
案例五:PLOS ONE — 强噪声下的滚动轴承故障诊断
文献:Rolling bearing fault diagnosis method based on gramian angular difference field and deep neural network under strong noise interference. PLOS ONE, 2024. DOI: 10.1371/journal.pone.0314898.
方法:
- 原始振动信号 → GADF 图像
- EMD(经验模态分解)预降噪 + GADF 编码
- DenseNet 分类
意义:在信噪比 −6 dB 的极端噪声条件下,准确率仍达 95%,显著优于直接用1D信号的方法,证明了 GADF 对噪声有一定的结构鲁棒性。
7. 代码速查:Python 实现
7.1 GASF/GADF 快速实现(使用 pyts 库)
# pip install pyts matplotlib numpy
import numpy as np
import matplotlib.pyplot as plt
from pyts.image import GramianAngularField
# 生成示例时间序列
t = np.linspace(0, 4 * np.pi, 100)
X = np.sin(t) + 0.1 * np.random.randn(100)
X = X.reshape(1, -1) # pyts 要求 shape: (n_samples, n_timestamps)
# 计算 GASF
gasf = GramianAngularField(method='summation') # GASF
gasf_img = gasf.fit_transform(X)
# 计算 GADF
gadf = GramianAngularField(method='difference') # GADF
gadf_img = gadf.fit_transform(X)
# 可视化
fig, axes = plt.subplots(1, 3, figsize=(15, 4))
axes[0].plot(t, X[0])
axes[0].set_title('原始时间序列')
axes[1].imshow(gasf_img[0], cmap='rainbow', origin='lower')
axes[1].set_title('GASF 图像')
axes[2].imshow(gadf_img[0], cmap='bwr', origin='lower')
axes[2].set_title('GADF 图像')
plt.tight_layout()
plt.show()
7.2 从 GASF 还原时间序列
def gasf_inverse(gasf_matrix, x_min=None, x_max=None):
"""
从 GASF 图像的主对角线恢复归一化时间序列。
假设条件:
- 原始序列归一化到 [0, 1](此时变换为双射)
- gasf_matrix 为无损原始矩阵(非 JPEG 压缩图)
参数:
- gasf_matrix: np.ndarray, shape (N, N)
- x_min, x_max: 原始序列的最小/最大值(用于反归一化,可选)
返回:
- x_normalized: 归一化序列 [0, 1]
- x_original: 反归一化序列(若提供了 x_min, x_max)
"""
# Step 1: 提取主对角线
diag = np.diag(gasf_matrix) # d_i = cos(2*phi_i) = 2*x_i^2 - 1
# Step 2: 反算归一化值(仅适用于 [0,1] 归一化)
# cos(2φ) = 2x² - 1 => x = sqrt((cos(2φ) + 1) / 2)
x_normalized = np.sqrt(np.clip((diag + 1) / 2, 0, 1))
# Step 3: 反归一化(可选)
if x_min is not None and x_max is not None:
x_original = x_normalized * (x_max - x_min) + x_min
return x_normalized, x_original
return x_normalized
# 验证
from sklearn.preprocessing import MinMaxScaler
X_raw = np.array([0.2, 0.5, 0.8, 0.4, 0.9, 0.1, 0.6])
x_min, x_max = X_raw.min(), X_raw.max()
# 归一化到 [0, 1]
X_norm = (X_raw - x_min) / (x_max - x_min)
# 手动构造 GASF
phi = np.arccos(X_norm)
GASF = np.array([[np.cos(phi[i] + phi[j]) for j in range(len(phi))]
for i in range(len(phi))])
# 逆变换
X_recovered_norm, X_recovered = gasf_inverse(GASF, x_min, x_max)
print("原始序列:", X_raw)
print("恢复序列:", X_recovered)
print("最大误差:", np.max(np.abs(X_raw - X_recovered))) # 应约为 0(机器精度)
7.3 MTF 和 RP 实现
from pyts.image import MarkovTransitionField, RecurrencePlot
# MTF
mtf = MarkovTransitionField(n_bins=4) # 4 个量化区间
mtf_img = mtf.fit_transform(X)
# 递归图
rp = RecurrencePlot(threshold='point', percentage=20)
rp_img = rp.fit_transform(X)
8. 总结与选型建议
8.1 核心结论
- GASF/GADF 是目前工程应用最广泛的时序升维方法,数学原理清晰,与 CNN 结合效果出色。
- GASF 在 [0,1] 归一化条件下具有双射性,可以从图像主对角线无损还原原始时间序列——这是它有别于其他方法的独特优势。
- 不同方法捕捉不同维度的信息,实际应用中多种编码融合通常优于单一方法。
- 时频方法(STFT/CWT) 在语音、振声领域历史更悠久,工具链成熟,也具有可逆性。
- TimesNet 的周期重塑 代表了一种不依赖手工设计的”学习式”升维思路,在时序预测任务上表现最优。
8.2 可逆性汇总
完全可逆(信息无损):
✅ GASF([0,1]归一化 + 无损存储)— 从主对角线恢复
✅ STFT(保留复数系数)
✅ CWT(保留复数系数)
✅ TimesNet Reshape(reshape 天然可逆)
有条件/部分可逆:
⚠️ GASF([-1,1]归一化)— 符号歧义,需辅助 GADF
⚠️ STFT/CWT 幅度图 — 丢失相位,Griffin-Lim 近似恢复
不可逆:
❌ GADF(单独使用)
❌ MTF(量化损失)
❌ RP(阈值二值化)
❌ SDP(镜像对称损失)
8.3 一句话选型指南
| 你的需求 | 推荐方法 |
|---|---|
| 复用 ImageNet 预训练 CNN,快速搭建基线 | GASF + GADF |
| 需要还原原始曲线(可逆) | GASF([0,1]) 或 TimesNet Reshape |
| 振动/声音信号,频率信息重要 | CWT Scalogram 或 STFT 语谱图 |
| 非线性动力学、混沌系统分析 | RP(递归图) |
| 时间序列预测(长序列) | TimesNet Reshape |
| 多方法融合提升分类性能 | GASF + MTF + RP 三合一 |
参考文献
-
Wang, Z., & Oates, T. (2015). Imaging time-series to improve classification and imputation. IJCAI 2015. arXiv:1506.00327.
-
Wu, H., Hu, T., Liu, Y., Zhou, H., Wang, J., & Long, M. (2023). TimesNet: Temporal 2D-variation modeling for general time series analysis. ICLR 2023. arXiv:2210.02186.
-
Eckmann, J. P., Kamphorst, S. O., & Ruelle, D. (1987). Recurrence plots of dynamical systems. Europhysics Letters, 4(9), 973.
-
Bagnall, A., Lines, J., Bostrom, A., Large, J., & Keogh, E. (2017). The great time series classification bake off. Data Mining and Knowledge Discovery, 31(3), 606–660.
-
Transformer fault diagnosis method based on Gramian Angular Field and optimized neural network. Scientific Reports (Nature), 2025. https://doi.org/10.1038/s41598-025-08590-2
-
A New Method for Diagnosing Motor Bearing Faults Based on Gramian Angular Field Image Coding and Improved CNN-ELM. IEEE Transactions on Industrial Electronics, 2023. DOI: 10.1109/TIE.2023.
-
Combining 2D encoding and convolutional neural network to enhance land use and land cover mapping from satellite image time series. Engineering Applications of Artificial Intelligence, 2023. https://doi.org/10.1016/j.engappai.2023.106354
-
A Novel Method for Rolling Bearing Fault Diagnosis Based on Gramian Angular Field and Few-shot Learning. Sensors, 24(12), 2024. DOI: 10.3390/s24123967
-
Rolling bearing fault diagnosis method based on gramian angular difference field and deep neural network under strong noise interference. PLOS ONE, 2024. DOI: 10.1371/journal.pone.0314898